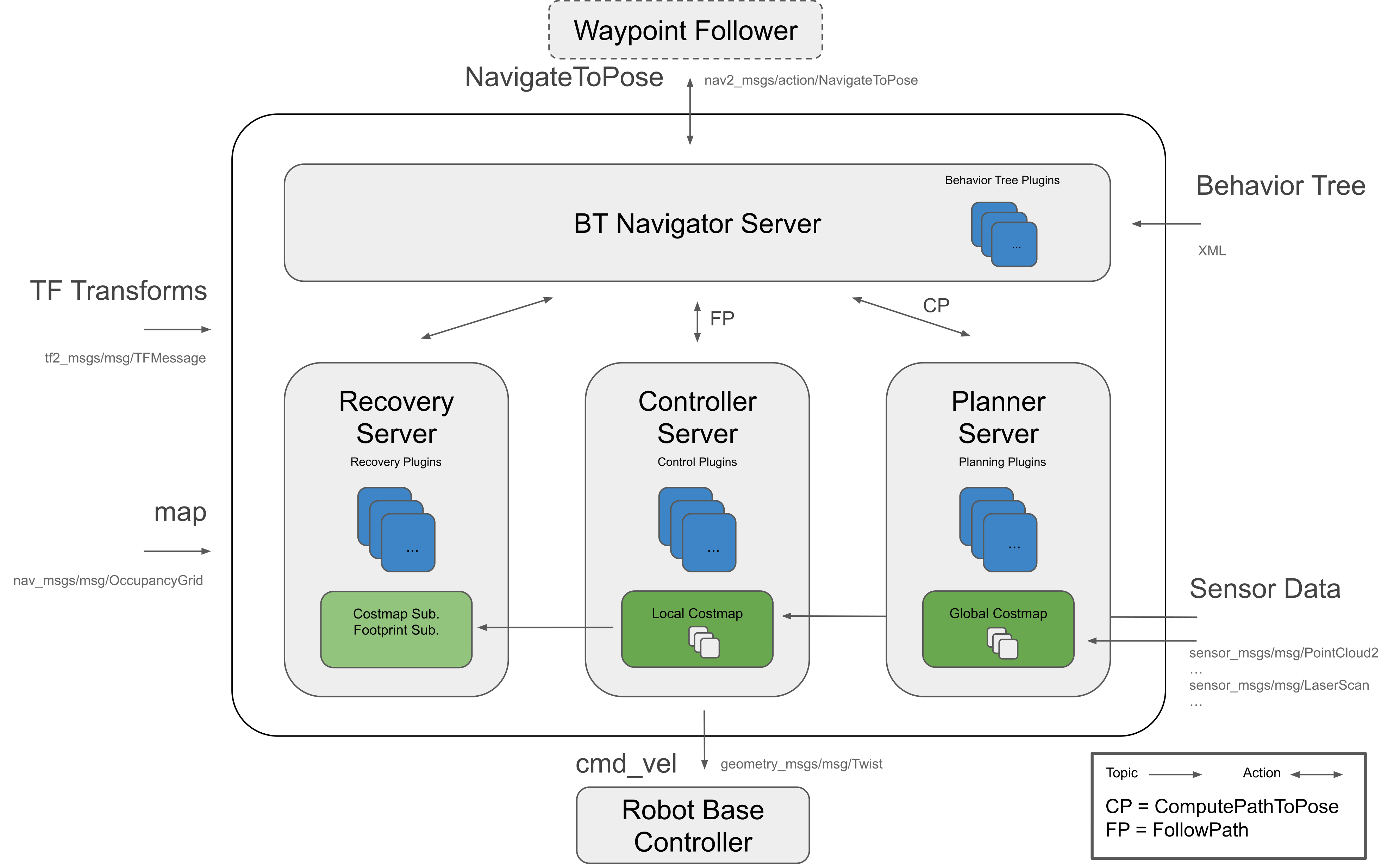
본 시나리오에서 Nav2로 발행되는 토픽 및 메시지 타입
| ROS2 Topic | ROS2 Message Type |
|---|---|
| /tf | tf2_msgs/TFMessage |
| /odom | nav_msgs/Odometry |
| /map | nav_msgs/OccupancyGrid |
| /point_cloud | sensor_msgs/PointCloud |
| /scan | sensor_msgs/LaserScan (published by an external pointcloud_to_laserscan node) |
# Isaac Sim 5.1 (Using Internal ROS2)
export ROS_DOMAIN_ID=0
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export FASTRTPS_DEFAULT_PROFILES_FILE=/opt/.ros/fastdds.xml
export ROS_DISTRO=humble
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/humble/lib
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/kimelab/isaacsim51/exts/isaacsim.ros2.bridge/humble/lib
source ~/IsaacSim-ros_workspaces/humble_ws/install/local_setup.bash
~/isaacsim51/isaac-sim.sh --ros-bridge=ros2 --/persistent/isaac/asset_root/default="<https://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/5.1>"