isaacsim.ros2.bridge 확장 기능 활성화:
carter_navigation, iw_hub_navigation, isaac_ros_navigation_goal 패키지 필요. [링크]ros2_ws (humble_ws) 내에 위치.
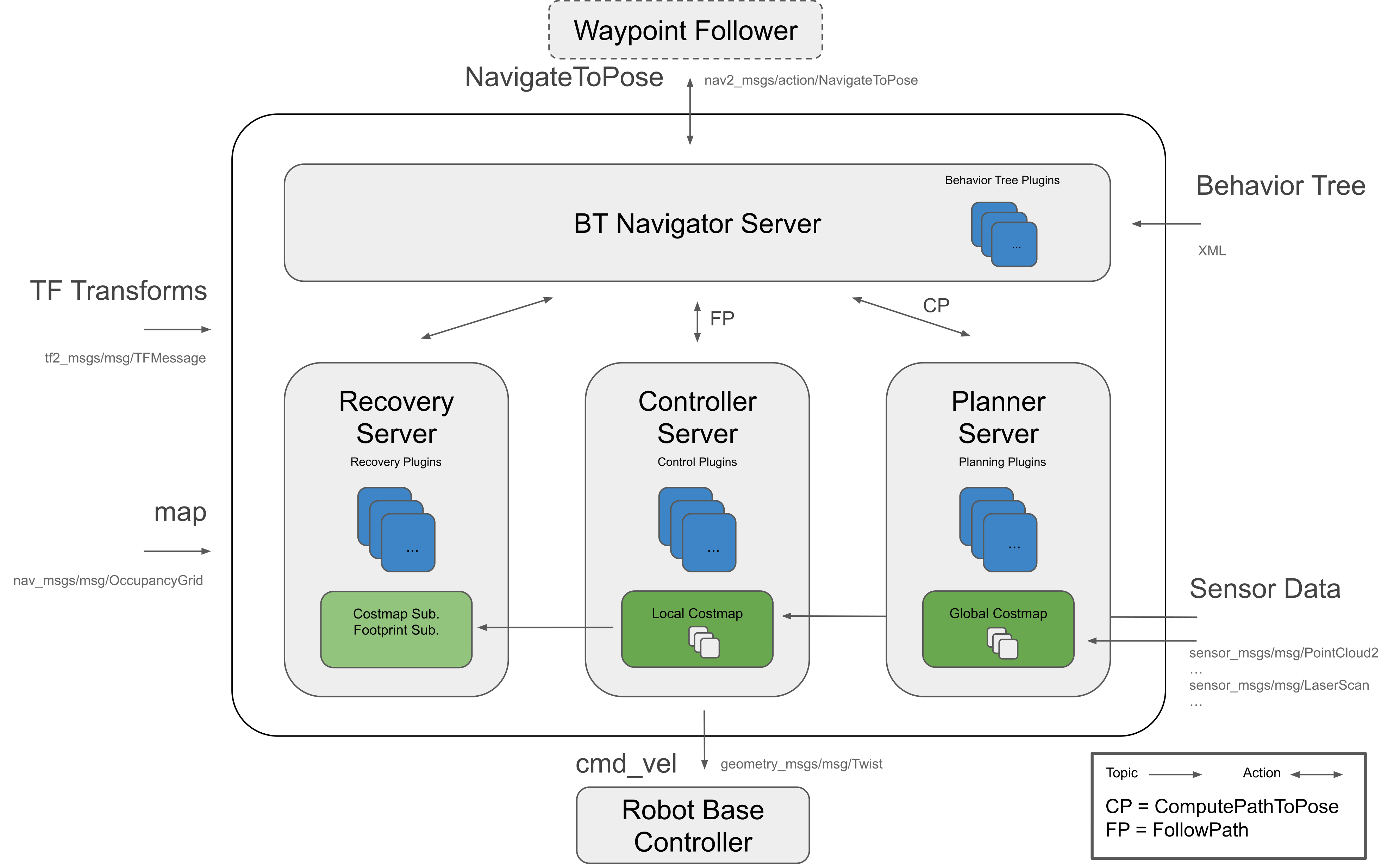
본 시나리오에서 Nav2로 발행되는 토픽 및 메시지 타입
| ROS2 Topic | ROS2 Message Type |
|---|---|
| /tf | tf2_msgs/TFMessage |
| /odom | nav_msgs/Odometry |
| /map | nav_msgs/OccupancyGrid |
| /point_cloud | sensor_msgs/PointCloud |
| /scan | sensor_msgs/LaserScan (published by an external pointcloud_to_laserscan node) |